北理工邀請俄羅斯莫斯科鮑曼國立技術大學教授來訪
發布日期:2016-04-29 供稿:自動化學院 傅薈瑾 攝影:自動化學院 邱凡
編輯:自動化學院 張男 閱讀次數:

18日上午Lobusov教授在自動化學院ININ會議室作了題為“捷聯慣性導航系統與算法”的學術報告,介紹了捷聯慣性導航理論及其在航天器導航中的應用。

下午,Neusypin教授在七號樓報告廳作了題為“高精度飛行器導航系統”的學術報告,介紹了飛行器導航信息處理與融合技術,自動化學院100多位師生參加了報告會;19日上午Neusypin教授在自動化學院ININ會議室作了題為“飛行器智能控制系統與技術”的學術報告,介紹了智能導航及智能機電中俄國際聯合實驗室,講述了飛行器智能控制的先進算法與目前面臨的重要問題。
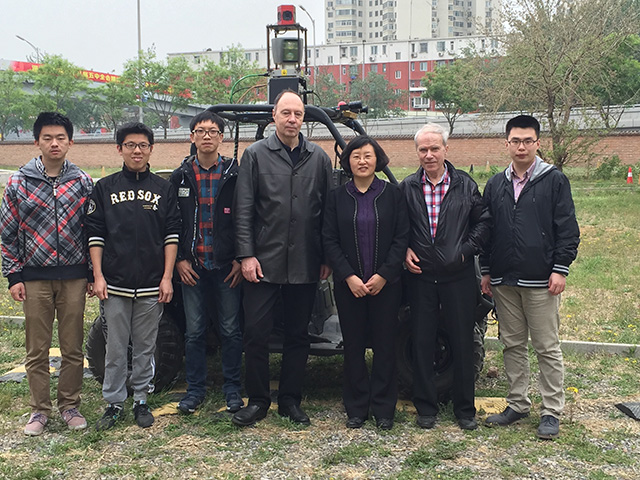
19日下午,Neusypin教授和Lobusov教授首先觀看了ININ研究室的無人車(IN2Bot)演示實驗,與智能車團隊師生針對IN2Bot的技術特色進行了現場交流,并饒有興趣地乘坐無人車體驗自主駕駛;隨后參觀了網絡化控制實驗室和和新型慣性傳感器實驗室。最后,雙方教授針對無人移動平臺的組合導航研究方向進行了深入交流,下一步將在教材出版、人才培養、項目合作與申報等方面開展合作。
相關資料:
Neusypin教授,俄羅斯技術科學博士,莫斯科鮑曼國立技術大學智能系統科學與教育中心主任,俄羅斯聯邦政府獎章獲得者。1986年獲得蘇聯副博士學位,1996年獲得俄羅斯最高學位——技術科學博士,1999年成為莫斯科鮑曼國立技術大學教授。主要研究方向為:卡爾曼濾波與組合導航,飛行器智能控制系統,近地飛行器高精度導航系統等。發表學術論文200余篇,專著18本,發明專利8項。